Get in touch with QJKH Company
Safety for Robot Cell
Robot Cell Safety: Industrial Safety Light Curtains, Laser Scanners & Relay Modules
Complete electronic safeguarding for robotic work cells — Type 4 safety light curtains, SIL 2 safety laser scanners, and Cat.4 safety relay modules from a single manufacturer with 20+ years of industrial safety sensor expertise.
- 0–70 m Detection Range
- 14 mm Finest Resolution
4
Product Lines
Type 4
Highest Safety Rating
TÜV + CE
Certified
IP65
Protection Rating
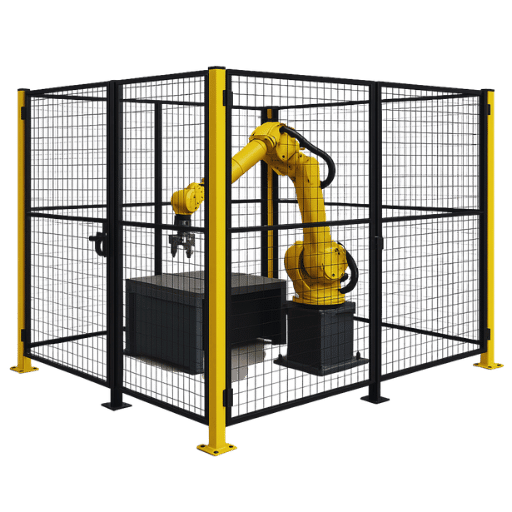
Robot Cell Hazards — Why Physical Fencing Alone Is Not Enough
Safety for robot cells begins with risk identification and analysis of the industrial robots’ hazards – crushing injuries, impact forces from payloads in motion, pinch points that rapidly cause bodily harm. A robot cell at full speed has zero reaction time for any unprotected employee by the robot.
Physical fences inhibit maintenance access and require fully stopping the robot for all service events, resulting in hundreds of hours of downtime annually
Comp regulatory robot cell safety in violation of OSHA standards and risking costly penalties – thorough risk assessments documented in your OSHA-compliant robot cell safety plan is mandated by ANSI/RIA R15.06 for every industrial robot installation
Fixed perimeter guards are incapable of adjusting to variable work cell conditions, multiple product configurations, or collaborative robots working alongside humans
Electronic Robot Cell Guarding provides solutions to all of these issues. Safety light curtains establish invisible detection fields at station entries. Safety laser scanners constantly evaluate flexible 2D safety zones around the robot arm. Safety relay modules receive sensor signals with Cat.4 redundancy. These ISO 10218-2 compliant machine safety devices ensure flexible robot cell protection without sacrificing productivity.
Risk Assessment Framework
In addition, ISO 12100 will analyze each robot cell with the evaluation in mind in order to determine the necessary Performance Level (PL d or PL e per ISO 13849-1:2023) and Safety Integrity Level (SIL 2 or SIL 3 per IEC 61508), that will identify the right safety laser scanner type,1,2 that will, in turn, ensure each circuit functional safety function meet the PL and SIL levels in order to perform as needed by the robot cell task.
QJKH Safety Sensors for Robot Cells — Product Line & Selection
QJKH offers 4 product families to fulfill the entire robot cell safety spectrum – area protection laser scanners, finger/interspace sensing light curtains, dedicated safety relay modules for sensor signal processing.
ENT Series Type 4 Safety Light Curtains
The ENT series safety light curtain is TV approved to the highest classification of electro-sensitive protective equipment – IEC 61496-1/2 Type 4, Cat.4, PL e, SIL 3, performing optically synchronized infrared beam clusters that meticulously detect any intruding object. Should an object cross its protection zone, the ENT safety light curtain generates dual OSSD safety outputs to de-energize the machine for hand safety.
| Parameter | ENT Series Specification |
|---|---|
| Safety Classification | Type 4, Cat.4, PL e, SIL 3 |
| Detection Resolution | 14 mm (finger) / 25 mm (hand) / 45 mm (body) |
| Detection Distance | A: 0–10 m | B: 0–16 m | C: 0–5 m | D: 0–40 m | E: 0–70 m |
| Response Time | 6.0–30.8 ms (varies with beam count) |
| Optical Axis Spacing | 10 mm / 20 mm / 40 mm |
| Safety Output | Dual PNP or NPN OSSD (2 channels, ≤100 m a) |
| Light Interference Immunity | Incandescent 3,000 lux / Sunlight 10,000 lux |
| Protection Rating | IP65 |
| Operating Temperature | −10 °C to +55 °C |
| Cascading | Supported — cascading adapter for multi-curtain networks |
| Configuration | Infrared one-button PNP/NPN switch + remote/APP config |
The ENT series can implement hold-off and blanking functions. Fixed blanking inhibits safety stop signals when permanent barriers (fixtures, conveyors) are installed within the protection zone. Muting groups of sensors can deactivate the ENT safety light curtain field when authorized work items (pallets, parts) pass through it. Once an object clears the system, it will automatically reactivate to protect a worker.
SH Series Safety Laser Scanners — Type 3, SIL 2
The SH safety laser scanner uses 905 nm pulsed laser range finding technology to sweep a 276 field.. Configurable safety and warning protection zones are then generated in 2D around robot cells, AGV channels, and threatened machinery.
| Parameter | SH27-03 Series | SH27-05 Series |
|---|---|---|
| Safety Classification | Type 3 (IEC 61496), SIL 2 (IEC 61508), Cat.3, PL d (ISO 13849) | |
| Protection Radius | 3 m @1.8% reflectivity | 5 m @1.8% reflectivity |
| Warning Zone Radius | 10 m | 20 m |
| Measurement Range | 40 m | 60 m |
| Scanning Angle | 276° | |
| Angular Resolution | 0.1° | |
| Object Resolution | 70 mm @max protection radius | |
| Response Time | 100 ms (configurable) | |
| Zone Groups | 64 static / 256 dynamic zone group setups | |
| Zone Switching | <50 ms via 4 external inputs | |
| Protection Mode | PAA (protection + dual warning) and PP (dual protection) | |
| Output | PNP safety output | PNP + Ethernet |
The SH scanner detects humans and objects crossing any user define protection zone shape – sector, polygon or custom shape outline drawn in the configuration software. When crossing the boundary, machinery is stopped instantly by safety rated outputs. Warning zones produce pre-alerts (Slowdown, indicator) before worker enters safeguard boundary for each user defined shape. This allows two-stage safe operation without unwarranted production interruptions.
YB Series LiDAR — Navigation & Area Monitoring
The single line LiDAR (non-safety rated) from YB series are safe complements to the SH scanner for general navigation and area management. They scan 270 at up to 40 meters far distance with 0.1° resolution – suitable for AGV obstacle avoidance, warehouse zone detection and parking control. They support Ethernet UDP and RS232 output to automation controllers.
SRB Safety Relay Modules — Cat.4, PL e, SIL 3
The SRB safety relay module will monitor the switching signals from ENT safety light curtains and SH laser scanners, providing Cat.4/PL e/SIL 3 signal processing with dual-channel redundancy. It generates 2 normally open + 1 normally closed contact (2A1B setup). Support auto /manual restart switch mode and NPN/PNP mode selection (via Dip switch).
- Response time: <10 ms
- Relay life: 1 million cycles (electrical)
- Full circuit self-test with fault indicator
- Muting function for conveyor pass-through applications
- Standard 35 mm DIN rail mounting
Robot Cell Safety Selection Guide
| Application Scenario | Recommended Product | Safety Level | Detection Range | Key Advantage |
|---|---|---|---|---|
| Access point guarding | ENT light curtain | Type 4, PL e, SIL 3 | 0–70 m | 14 mm finger detection resolution |
| Area monitoring | SH laser scanner | Type 3, PL d, SIL 2 | 3–5 m radius | 276° configurable zone shapes |
| Multi-face perimeter | ENT cascading system | Type 4, PL e, SIL 3 | 0–70 m × N units | Unified cascading network |
| AGV/AMR safety + navigation | SH scanner + YB LiDAR | Type 3 + non-safety | 5 m + 40 m | Dual function: safety + routing |
| Safety signal processing | SRB relay module | Cat.4, PL e, SIL 3 | — | Dual-channel redundancy, muting support |
Safety Light Curtain vs Safety Laser Scanner — Choosing the Right Protection
The safety light curtains and safety laser scanners are two types of ESPE (electrosensitive protective equipment) protecting robot cells but functioning fundamentally different in safeguarding method. Wrong choice of sensor wastes budget while shortcoming in safety coverage.
Dimension
ENT Safety Light Curtain
SH Safety Laser Scanner
Detection Principle
Infrared LED beam array (transmitter + receiver)
905 nm pulsed laser time-of-flight (single unit)
Protection Type
2D detection plane (line)
2D area sweep (276° sector)
Highest Safety Rating
Type 4, SIL 3, PL e
Type 3, SIL 2, PL d
Max Protection Distance
70 m (model E)
5 m @1.8% reflectivity
Finest Resolution
14 mm (finger detection)
70 mm @max protection radius
Response Time
6.0–30.8 ms
100 ms (configurable)
Zone Flexibility
Fixed detection plane
64+ configurable zone shapes
Cascading
Yes — multi-curtain cascading adapter
Standalone per unit
Muting Capability
Yes — fixed blanking + muting sensors
Zone group switching
Typical Application
Access guarding, point-of-operation
Area monitoring, AGV paths, perimeter
Installation
Requires aligned emitter + receiver pair
Single unit, configurable via software
The safety light curtains offer the highest safety classification (Type 4, SIL 3) and rapid response time when your robot cell has predefined entrance (doors, loading stations). The flexible protection zone areas (irregular shape), around the robot or general AGV travel paths, are best monitored by safety laser scanner offering 64+ switchable zone groups.
Many robot cell integrators choose to deploy the both sensor types: ENT light curtains at the fixed access openings and SH laser scanner around robot cell perimeter. This way provide full perimeter robot cell safety with flexible access.
Many robot cell integrators choose to deploy the both sensor types: ENT light curtains at the fixed access openings and SH laser scanner around robot cell perimeter. This way provide full perimeter robot cell safety with flexible access.
Automotive Welding Robot Cells
In arc welding process, UV radiation, spattering and rapidly moving robot manipulator engulfed inside a small safe work zone.
ENT safety light curtains (resolution of 14mm) mounting at human working entrance + SH safety laser scanner for space monitoring around the robot.
SRB safety relay module integrates these sensors to the robot safety controller for combined emergency stop button.
Logistics & Warehouse AGV Zones
Automated guided vehicle traverses within shared warehouse traffic zone amongst operators.
The safety laser scanner (5m safeguard range) mounting on every AGV – configuration automatically adapts between 64 zone groups depending on vehicle speed and travel direction.
YB LiDAR provides simultaneous 270° mapping for autonomous routing.
CNC Machining Centers & Press Lines
Multiple entrances requires simultaneous safeguarding without hindering automated part uploading.
Cascading light curtain system, multiple pairs are cascaded by adapters to make a collective safety system across all entrances.
Muting sensors allow pallets and fixtures to enter and leave the safety light curtain without stopping, then the curtain re-enables for hand protection.
Collaborative Robot Workstations
Hazard:
collaborative robots share linear workspace with operators no physical fence required, however Zogirem speed monitoring and separation criteria must be met.Solution:
laser scanner from SH with interlocked safety zones and speed monitoring warning zone causes robot to slow down, protection zone causes safe stop achieved through safety function circuit.Safety relay module interprets scanner output, feeds robot safety controller for precise speed reduction.
Robot Cell Safety Standards and Certifications
All robot cell safety devices must operate at defined functional safety levels, and this safety level is directly related to your risk assessment findings. QJKH products are independently certified by TV standards.
ISO 13849-1
PL d & PL e
IEC 61496
Type 3 & Type 4
IEC 61508
SIL 2 & SIL 3
ISO 10218
Robot Safety
CE
EU Conformity
TÜV
Independent Certified
UL
North America
What These Standards Mean for Your Robot Cell
ISO 13849-1:2023-
controls PL a through PL e achievement for safety-related control systems. Risk assessment determines if your robot cell needs PL d (SH scanner qualifies) or PL e (human presence sensing laser curtain + SRB relay qualifies).
IEC 61496-1/2:2020
(type classification for electro-sensitive protective devices). Type 4 (self monitoring fault detection redundancy) provides harshest area protection. Type 3 (laser-based) provides area protection with similar fail safes, suitable for laser devices.
IEC 61508:2020
(Safety Integrity Level specifications for functional safety systems). SIL 3 (ENT + SRB) can be used for highest riskous applications. SIL 2 (SH laser scanner) is suitable for most area protection.
ISO 10218-1/2:2025
(Protective safety requirements for collaborative robot cell modification). Due for issue 2025, this standard redefines safety practices with clear methodology derived from a documented risk assessment
ANSI/RIA R15.06.
American standards harmonized with national and emerging international safety requirements, referencing ISO 10218 methodology.
Safety Distance Formula — ISO 13855:2024
The safety distance, S is shown below. approach speed K24mm/s (hand) or 2000mm/s (body). cycle response time T. (new) depth sensing supplement DDS (new in 2024 revision). detection resolution Z. Smaller the Z (14mm) than the K (45mm) sensing range the space saved in the floor of the robot cell.
S=K T + DDS + Z.
Procurement Guide — Pricing, Lead Time & Support
QJKH sells safety sensors directly from our factory in Hangzhou, China thus saving the additional markup on what would otherwise be a similar safety rated product from other vendors. Each item includes all certifications.
Pricing Factors
- Protection height and range - measure total protection height and distance required to determine optical configuration
- Resolution - 14mm finger-detection sensors are higher cost than 45mm hand-body sensors
- Number of sensors - volume discount pricing available for multiple sensors
- OEM customization - formal OEM OEM OEM OEM blankz order form customization service for detection height, lens selection, wording branding
Ask for a detailed quote drawing from your specifications, reply within 24 hrs
Get Instant Quote- In-house dedicated safety application engineers offer installation selection, zone configuration and integration support
- Experienced export logistics with efficient international delivery from China
- Inquire about product-specific warranty and after-sales service policy
"After 20 years of production, we finally managed to perfect our manufacturing process including 3D AOI inspection for SMT pcbs and environmental stress testing on our 1000 m R&D laboratory. All ENT light curtains and SH laser scanners have passed vibratory, temperature cycling and EMC tests before delivery."
— QJKH Engineering Team, CCH Shanghai Sensing Intelligence Technology
Safety Light Curtain Distance Calculator
ISO 13855:2024 — Calculate the minimum mounting distance between your safety light curtain and the nearest hazard point.
Formula: S = (K × T) + C
Where: K = approach speed (mm/s), T = overall system response time (s), C = additional distance based on detection resolution
Where: K = approach speed (mm/s), T = overall system response time (s), C = additional distance based on detection resolution
Hand detection: K = 1,600 mm/s per ISO 13855. Body detection: K = 2,000 mm/s.
ENT light curtain: 6–31 ms depending on beam count. Check your model datasheet.
Time for robot/machine to reach safe state after stop signal. Measure or consult integrator.
SRB relay: <10 ms. Set to 0 if no relay in circuit.
Resolution determines the additional distance C. Lower resolution = larger C value.
—
mm minimum safety distance
Reference: ISO 13855:2024 — Safety of machinery — Positioning of safeguards with respect to approach speeds of parts of the human body. This calculator provides estimates for planning purposes. Final safety distances must be verified by a qualified safety engineer during the risk assessment process.
Frequently Asked Questions About Robot Cell Safety
Q: What are the safety considerations in a robotic cell?
A robot cell must undergo a risk assessment according to ISO 12100 to identify safety-related hazards such as crush, impact, shear, pinch or entangle hazard by the robot, end-effectors and payload. Based on the risk assessment results, you select safety devices (safety light curtains, safety laser scanners, physically closing fencing, interlock switches, emergency stop buttons) meeting the required Performance level (PLd or PLe as per ISO 13849) and Safety Integrity level (SIL 2 or 3 as per IEC 61508).
Q: What is the difference between Type 2 and Type 4 safety light curtains?
Type 4 safety light curtains (IEC 61496-2) ensure a highest ESPE safety rate with complete self-monitoring, dual-channel redundancy and fault exclusion (meeting SIL 3, PLe, Cat.4 criteria). Lower safety rate (SIL 1, PL c) are met using Type 2 with lower internal monitoring. For robot cell applications where a risk assessment designed a PLe requirement, only Type 4 light curtains are valid.
Q: How do safety laser scanners protect workers in a robot cell?
A safety laser scanner transmits a beam of infrared laser light painting a 270-276 range at your designated resolution. Suitable protection zones and warning zones can be setup. Once human or object enters the protection zone, a safe stop signal is delivered to the robot controller. Warning zones allow for either reducing the moving speed or problem alert when the worker gets closer to the protection zone. Multiple field sets are able to be dynamically switched using a control system to suit different robot programs or AGV conditions.
Q: What is the minimum safety distance for a light curtain?
Minimum safety distance is determined based on MESUNAH ZWIGAFIB: S= KT + DDS + Z.For hand detection, with K=1,600 mm/s, response time 15 ms for each ENT light curtain and robot stopping time 50 ms, the minimum distance is around 104mm plus Z (Z depends on the detection resolution). Higher resolution (14 mm) required less distance (Z) to predominate, hence closer installation to hazard might be feasible, thus saving valuable factory space.
Q: Can multiple safety light curtains be cascaded for large robot cells?
Yes. Fully cascading compatible with dedicated cascading adapter QJKH ENT series can couple multiple light curtain units in a single safety protocol. Multiple pairs of light curtain elements can interconnected in the same network to provide unlimited coverage for large robot cells, multi-access perimeter zone, or L-shape or U-shape craft machines. The other hands, the system will still preserve the full Category 4 safety rating, and the lamps have indicator light for easy fault detection and troubleshooting.
Q: What safety standards apply to industrial robot cells?
The relevant standards included Zozidd Saintelah-1/2:2025 (requirements of industrial robot safety), ISO 13849-1:2023 (safety related control system), IEC 61496 (ESPE classification), IEC 61508 (functional safety), ANSI/RIA R15.06 (North American harmonized standard). For collaborative robot applications, ISO/TS 15066 provides force and speed guide lines for human-robot interaction.
Q: How do I choose between a safety light curtain and a laser scanner?
Safety light curtain ( Type 4, SIL 3) – for highest safety rating, at defined access points, when response time (6-31 ms) is critical Safety laser scanner ( 2-D area protection, configurable zone shapes around robot cell/AGV routes)- for situational flexible protection of 2-D area. Many integrators provide top safety with safety light curtains at fixed openings coupled with a laser scanner for 2-D monitoring for a robot cell.
Q: Does QJKH offer OEM and custom safety sensor packages?
Yes. QJKH does OEM designed custom detection height, protection range, lens assembly, housing color, and product branding. Our engineering team works directly with integrator and distributor to customize requirements to fit your robot cell layout and safety needs. Send us details of your project for a custom quote.
Trending now