Get in touch with QJKH Company
A 3D LiDAR sensor fires laser pulses across multiple vertical and horizontal angles, times how long each reflection takes to return, and stitches millions of distance measurements per second into a three-dimensional point cloud. Unlike a camera, it is an active sensor — it carries its own light source, so it keeps working in complete darkness, through dust, and under direct sun. This guide walks through how the technology works, what scan mechanisms sit inside commercial sensors, how it differs from 2D LiDAR, the industrial applications where it earns its cost, the standards that govern it, a vendor-neutral selection framework, and the failure modes that vendor brochures rarely mention.
Quick Specs: Industrial 3D LiDAR Sensor
| Typical Wavelength | 905 nm (industrial) / 1550 nm (automotive, long-range) |
| Detection Range | 30 m (indoor) to 200 m+ (outdoor industrial) |
| Field of View (Vertical) | 30° to 90° (2D LiDAR = 0°, single plane) |
| Point Density | 60,000 – 300,000+ points per second |
| Laser Safety Standard | IEC 60825-1:2014 Class 1 (eye-safe) |
| Typical Ingress Rating | IP65 (indoor) / IP67 (outdoor) |
| Typical Frame Rate | 10 – 20 Hz |
What Is a 3D LiDAR Sensor? (Beyond the Hype)
A 3D LiDAR sensor — short for Light Detection and Ranging — is a remote sensing device that emits laser pulses in many directions, measures the time of flight of each reflected pulse, and builds a three-dimensional point cloud of its surroundings. Because it generates its own light, a 3D LiDAR sensor works equally well at 3 AM as at noon, and it does not care whether the target is red, black, or mirror-polished.
LiDAR is older than most people assume. The first space LiDAR flew aboard Apollo 15 in 1971 — a laser altimeter built by RCA that measured the command module’s altitude above the lunar surface to within one meter. It stayed an aerospace and geospatial tool for decades, then GPS integration in the 1980s and commercial mobile scanners in the 2000s pushed it into surveying and mining. The 2020 Apple iPad Pro introduced a miniature LiDAR scanner to consumers, and industrial deployments for automated guided vehicle navigation, perimeter security, and robotics have followed the same cost curve.
The Two-Sentence Definition Most Vendor Brochures Get Wrong
Vendors often describe 3D LiDAR as a “next-generation sensor.” The accurate description is simpler: it is an active sensor (carries its own light source) that produces range measurements (not images), organized as a 3D point cloud (not a photo). That distinction matters because a camera and a 3D LiDAR solve different problems. A camera answers “Is that a cat or a dog?” using color and texture. A 3D LiDAR answers “How far away is it, what volume does it occupy, and is it moving?” using geometry. Tesla’s public dismissal of lidar technology as a “crutch” aged poorly — Mark Rober’s viral 2025 testing of camera-only versus LiDAR-equipped autonomous driving revived the industry conversation and reminded buyers that active range sensing still solves problems passive vision cannot.
📐 Engineering Note
Active versus passive sensing is the deciding line. A camera is a passive sensor — no ambient light means no information. A 3D LiDAR illuminates its own scene, so it performs identically at midnight and noon. That single property is why dusty warehouses, dark loading docks, and fog-bound perimeters still drive lidar specification decisions rather than cheaper camera setups.
How 3D LiDAR Works: From Laser Pulse to Point Cloud Frame
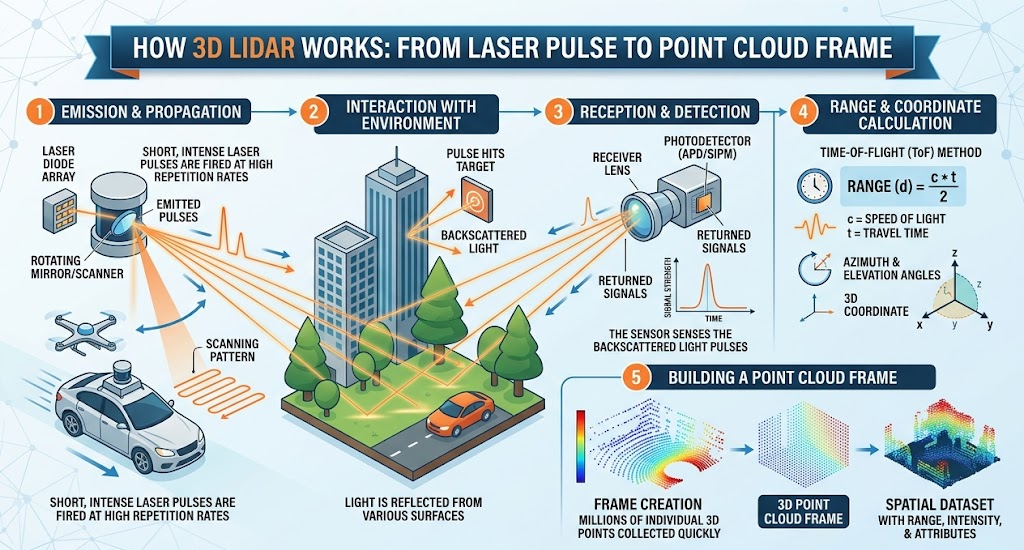
Every 3D LiDAR sensor performs the same four operations, millions of times per second. Understanding the pipeline makes specification decisions — wavelength, frame rate, angular resolution — far less mysterious when they appear on a datasheet.
The Pulse-to-Point-Cloud Pipeline in Four Steps
- In the emit stage, a laser diode fires a brief pulse of near-infrared light — typically 905 nm for industrial sensors, 1550 nm for long-range automotive variants.
- During reflection, the pulse travels outward, bounces off the first surface it hits (and sometimes several), then returns toward the sensor.
- At the receive-and-time step, a photodetector catches the returning pulse; the sensor measures time of flight — the elapsed time between emission and detection.
- For the compute stage: because the speed of light is 299,792,458 m/s, distance equals (time of flight × speed of light) ÷ 2. Each pulse produces one 3D coordinate, and several thousand to several hundred thousand coordinates per second build a point cloud.
Each complete sweep of the scene is called a frame. Industrial 3D LiDAR typically delivers 10 to 20 frames per second. A 20 Hz sensor producing 300,000 points per second means every frame holds roughly 15,000 distance measurements — enough spatial density for an autonomous vehicle or warehouse robot to act on what it sees before the next frame arrives.
Why Frame Rate Matters More Than Raw Point Count
A common first mistake in 3D LiDAR procurement is selecting by points-per-second alone. A sensor producing 500,000 pts/sec at 10 Hz and one producing 300,000 pts/sec at 20 Hz carry the same per-frame density — but the faster frame rate reacts to moving objects twice as often. For warehouse automation and mobile robotics, frame rate is usually the harder constraint than raw point count.
Multi-echo signal processing is the other parameter that separates consumer-grade from industrial-grade sensors. A single laser pulse can produce multiple reflections — one off an airborne dust particle and a second off the actual obstacle behind it. Single-echo sensors treat the first return as the target and miss the obstacle entirely. Multi-echo 3D LiDAR systems retain every return and classify which one represents the real object. This is how industrial lidar scanning achieves dust and rain tolerance that camera systems cannot match.
📐 Engineering Note
Choosing between 905 nm and 1550 nm wavelengths comes down to a Class 1 power budget decision. Human retinas absorb 905 nm more efficiently than 1550 nm, so IEC 60825-1:2014 permits higher emitted power at 1550 nm before the accessible emission limit is exceeded. That lets 1550 nm lidar see farther in sunlight and through light rain. The offset is component cost: indium phosphide detectors for 1550 nm are substantially more expensive than silicon detectors for 905 nm, which is why industrial Class 1 deployments still default to 905 nm.
3D LiDAR Scan Mechanism Types: Mechanical, MEMS, Flash & OPA

Every 3D LiDAR sensor sits in one of four main scan mechanism families — plus an emerging fifth — and the family decides cost, form factor, field of view, and reliability far more than the vendor name on the housing. Competitor guides rarely make this taxonomy explicit. It is the single most important thing to internalize before reading a lidar scanner datasheet.
| Mechanism | Moving Parts | Horizontal FoV | Typical Range | Cost Tier | Typical Use |
|---|---|---|---|---|---|
| Mechanical spinning | Rotating assembly | 360° | 50 – 200 m | $$$ | AGV, AMR, perimeter |
| MEMS micromirror | Micro-scale | ≤ 120° | 30 – 150 m | $$ | Automotive, robotics |
| Flash (solid-state) | None | ≤ 90° | 20 – 50 m | $$ | Short-range perception |
| OPA (phased array) | None | ≤ 120° | 50 – 200 m | $$$$ | Emerging automotive |
| Non-repetitive (Livox-style) | Prism rotation | 70° – 360° | 50 – 450 m | $$ | Mapping, surveying |
Why Mechanical Spinning Still Dominates Industrial Deployments in 2026
Trade press pushes a narrative: solid-state 3D LiDAR is about to displace mechanical spinning variants. Market data says otherwise. The 2025 MarketsandMarkets LiDAR Market Report confirms that the mechanical LiDAR segment still accounted for the larger market share in 2024. Industry consolidation does not equal technology displacement: Ouster and Velodyne, the two pioneers of mechanical spinning lidar, completed their merger on February 10, 2023, forming a combined company with more than 850 customers — a signal of market maturation, not mechanical obsolescence.
Structural factors drive this. Industrial deployments need 360° horizontal field of view for AGV perimeter perception. Most MEMS and Flash lidars top out at 120°, so covering 360° requires four to six solid-state units — killing the cost advantage. A single mechanical spinner delivers the same coverage in one housing. Solid-state economics work when you ship millions of automotive units; they break down at industrial volumes.
Solid-State Sub-Types: MEMS vs Flash vs OPA Explained
Solid-state as a category covers three very different architectures. MEMS uses micro-electromechanical mirrors to steer a single laser beam — compact and low-cost, but the mirror is still a moving part at micro-scale, and the reliability claim is more nuanced than the marketing suggests. Flash LiDAR illuminates the entire scene with one pulse and reads it with a focal-plane detector array — true no-moving-parts, but vulnerable to sunlight saturation and therefore more common in short-range automotive and indoor perception. OPA (optical phased array) steers the beam electronically with no mirror at all — genuinely solid-state, expensive today, and still finding industrial-scale production.
A fifth category is worth noting. Non-repetitive scan patterns, pioneered by Livox and documented in a 2022 multi-modal LiDAR SLAM benchmark on arXiv, use a rotating prism to produce a dense, flower-like trace rather than parallel scan lines. That pattern delivers higher angular resolution with longer integration times, which makes non-repetitive sensors popular for volumetric mapping where frame-to-frame consistency matters less than total point density per scan.
A mid-size port automation integrator evaluating 3D LiDAR for container-yard perception ran into the coverage-versus-cost math directly. A MEMS sensor would have landed at roughly 45% of the unit price of a mechanical spinner, but the 120° horizontal field of view meant three sensors per crane instead of one. After cables, brackets, synchronization software, and maintenance factored in, total cost of ownership crossed the mechanical option after 18 months of operation. They bought mechanical. The lesson generalizes: scan mechanism cost advantages are a per-unit illusion when your application demands 360° coverage.
⚠️ Common Mistake
Assuming “solid-state = cheaper” without running the coverage math. MEMS and Flash lidars are cheaper per unit, but 360° industrial coverage requires multiple units — and the installed-system cost often ends up higher than a single mechanical head.
3D LiDAR vs 2D LiDAR: Trade-offs (Not Just “More Data”)
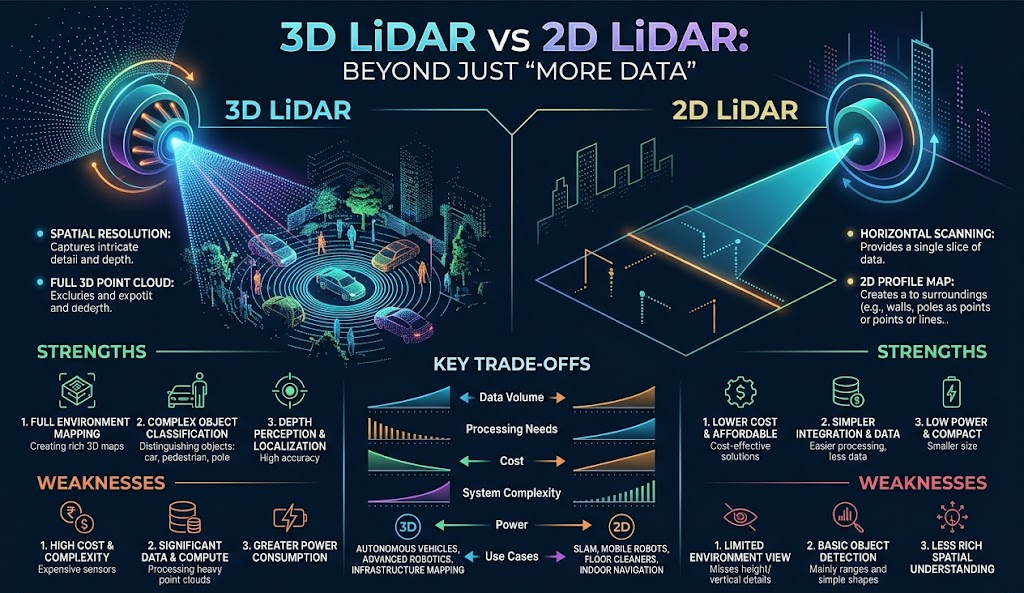
Lazy answers simply assert that 3D LiDAR beats 2D LiDAR because it captures more information. The accurate answer is that the two sensor types solve different problems, and picking the wrong one costs real money. For a deeper technical breakdown of 2D LiDAR fundamentals, a comparison is worth walking through before committing to a purchase.
| Specification | 2D LiDAR | 3D LiDAR |
|---|---|---|
| Horizontal FoV | 180° – 360° | 270° – 360° |
| Vertical FoV | 0° (single plane) | 30° – 90° |
| Typical Max Range | ~40 m | Up to 200 m (industrial), 450 m+ (automotive) |
| Point Density | ~10,000 pts/sec | 60,000 – 300,000+ pts/sec |
| Data Volume per Frame | ~500 points | 5,000 – 50,000 points |
| Relative Cost | $ | $$$ |
| SIL / PL Safety Certification | Available (dedicated safety scanners) | Rare — non-safety perception only |
Which Industries Prefer 2D LiDAR Over 3D LiDAR?
Plenty. Logistics robots that travel on flat floors and only need to detect obstacles at wheel-to-torso height get no benefit from vertical data. Manufacturing cells with fixed-height workstations hit the same ceiling. Security perimeters along fence lines care about intrusion in a vertical plane, not volumetric classification. In every one of these cases, 2D LiDAR is faster, cheaper, and often the only sensor available in SIL-rated safety variants.
Real AGV deployments frequently use both. A typical architecture, described in a recent robotics forum thread, splits the vehicle’s brain in two: a Siemens PLC handles safety-critical tasks (E-stop, bumper, SIL-rated 2D safety scanner), and an industrial PC handles SLAM and perception using a 3D LiDAR. The 2D scanner certifies the robot for operation around people; the 3D sensor makes the robot useful.
Decision Framework: 2D or 3D?
- Flat floor + torso-height obstacles + SIL/PL required → 2D safety laser scanner for AGV
- Multi-height obstacles, overhead conveyors, dynamic pallet stacks → 3D LiDAR
- Volumetric intrusion classification needed (human vs. vehicle vs. debris) → 3D LiDAR
- Outdoor perimeter > 100 m with weather tolerance → 3D LiDAR with multi-echo filtering
- Both safety certification AND volumetric perception → hybrid: 2D safety + 3D perception
Industrial Applications: From AGV SLAM to Volumetric Mapping
Five application categories account for the vast majority of 3D LiDAR deployments outside the automotive industry. Each one imposes different demands on range, angular resolution, and interface — which is why “best 3D LiDAR” is a question that can only be answered per-application.
Autonomous mobile robots rely on Simultaneous Localization and Mapping (SLAM) to know where they are and where they can go. The canonical algorithm, LOAM (Lidar Odometry and Mapping in Real-time), was published at Robotics: Science and Systems 2014 by researchers at Carnegie Mellon and uses an encoder resolution of 0.25° — a reminder that angular resolution, not just maximum range, is what matters for indoor localization. LIO-SAM and more recent multi-modal benchmarks like the 2023 MDPI study on LiDAR SLAM with ground truth have extended the architecture, but the point density demand has held: a warehouse AMR needs roughly 100,000 points per second to keep drift below 4 cm per meter traveled in a structured indoor cell.
Picture a Gen-4 AMR moving through a cross-dock operation at 1.8 m/s during a third-shift replenishment cycle. Pallet positions change every few minutes as forklifts stage incoming loads. A 2D scanner would see the pallets as unbroken walls; a 3D LiDAR registers the overhead conveyor at 3.6 m, the stacked cartons at 1.8 m, and the empty lane between — handing the SLAM stack enough geometric variety to correct odometry drift every frame. The robot finishes the aisle on schedule; the warehouse manager does not hear about it, which is the desired outcome.
Volumetric Mapping and Surveying (BIM, DEM, DTM)
Drone-mounted and tripod-mounted 3D LiDAR scanners generate the dense point cloud data that civil engineers convert into Digital Elevation Models, Digital Terrain Models, and Building Information Modeling (BIM) inputs. The lidar 3D mapping pipeline is where non-repetitive scan patterns earn their keep — the extra angular resolution per unit time matters more than frame rate when the sensor is stationary or moving slowly through an open environment.
Volumetric Perimeter Security
Traditional camera-based perimeter systems fail at night and in bad weather. 2D lidar fails to distinguish a person from a blown tarp. 3D LiDAR classifies intruders by volumetric shape — a 180 cm, 80 kg contour on two legs reads differently than a 40 kg quadruped or a 1,500 kg vehicle. For large outdoor sites, multi-echo 3D LiDAR with detection ranges out to 200 m covers the gap between camera-based analytics and radar.
Overhead Crane and Industrial Hazard Detection
Bridge cranes, gantry cranes, and overhead conveyor systems create three-dimensional hazard zones that 2D sensors cannot monitor. A dedicated LiDAR sensor for overhead crane installations maps the load path in real time, preventing collisions with cross-beams, adjacent crane bridges, and personnel on elevated walkways.
Autonomous Vehicle Perception
Automotive 3D LiDAR drove the cost curve that industrial users now benefit from. The autonomous vehicle perception stack typically fuses 3D LiDAR with cameras and radar: the lidar provides range accuracy and volumetric shape, the camera provides texture and color classification, and the radar provides velocity and long-range detection through weather. Industrial and automotive product lines increasingly share component supply chains — which is part of why the industrial lidar sensor market is tracking the automotive cost curve downward.
📐 Engineering Note
Critical SLAM specification here is angular resolution multiplied by scan rate, not maximum range. A sensor delivering 0.2° horizontal resolution at 20 Hz produces a denser, more localization-friendly cloud than one offering 300 m range but 1.0° resolution at 10 Hz — the second sensor’s clouds are four times sparser per frame, and the robot will drift faster. Always request the angular resolution spec alongside the datasheet range figure.
Laser Safety, IP Ratings, and Industrial Standards That Matter

Vendor marketing lists certifications as badges. Buyers need to read them as legal commitments about what the sensor has actually been tested to do. Three standards matter for 3D LiDAR specification decisions.
How IEC 60825-1 Class 1 Eye Safety Is Actually Tested
IEC 60825-1:2014 is the relevant standard, covering laser products that emit in the 180 nm to 1 mm wavelength range. Class 1 is the strictest safety category — it means the Accessible Emission Limit (AEL) stays below the Maximum Permissible Exposure (MPE) for all foreseeable viewing conditions. What most brochures omit is that the AEL calculation must include intrabeam viewing with optical instruments — in other words, what happens if someone looks directly at the beam through binoculars. That case, not naked-eye viewing, sets the practical power ceiling for industrial 905 nm lidars.
Compliance pathways for 905 nm and 1550 nm are well-documented in industry references like the Newtron-Tech IEC 60825 compliance guide. For buyers, the actionable takeaway is this: ask the vendor for individual-unit AEL test certificates, not just type certification. Type certification proves the design passes; individual-unit testing proves the sensor in your hand is compliant after assembly.
What IP67 Means Beyond the Datasheet Label
IP67 is an ingress protection rating defined in IEC 60529. The “6” means dust-tight — no dust penetration under standard test conditions. The “7” means the enclosure can be immersed in water up to 1 m deep for 30 minutes without failure. IP67 is the minimum reasonable rating for any outdoor 3D LiDAR deployment. IP65 is fine for indoor installations where condensation and wash-down water are the only exposure. Asking a sensor for IP68 or IP69K rating is usually wasted budget unless the deployment involves direct high-pressure wash-down.
Quality management as a layer — ISO 9001:2015 for manufacturing, plus ISO 14001:2015 for environmental management and ISO 45001:2018 for occupational health — does not speak to the sensor’s technical performance. It speaks to whether the manufacturer has the systems in place to ship a consistent sensor in batch 500 as they did in batch 1. For industrial procurement running large volumes, that consistency matters more than any single spec.
The RARE-I Framework: How to Select a 3D LiDAR Sensor (Vendor-Neutral)

After years of watching procurement teams wade through vendor datasheets, the same five dimensions keep deciding purchases. The RARE-I Framework — Range, Accuracy, Resolution, Environment, Interface — captures them in a form that works across any vendor’s product line.
“Most procurement errors in industrial lidar come from specifying a single headline number — usually maximum range — and assuming the rest will sort itself out. Buyers who ask about angular resolution and scan rate in the same sentence end up with sensors they do not have to replace.”
The RARE-I Five Dimensions
- Range — the distance at which the sensor still returns a reliable detection. Specify working range in your environment, not the best-case number from an anechoic test chamber.
- Accuracy — the ± tolerance on each distance measurement. Industrial sensors deliver ±2 cm in most cases; surveying-grade sensors reach ±5 mm but cost substantially more.
- Resolution — angular resolution (fraction of a degree between points) multiplied by scan rate. This is the SLAM-usable density number, far more important than raw points-per-second.
- Environment — IP rating, operating temperature range, multi-echo filtering, and tolerance to rain, fog, dust, or direct sun. Match to your worst expected site condition.
- Interface — Ethernet is table stakes. ROS/ROS2 native drivers are non-negotiable for robotics integration. CAN bus matters for automotive-adjacent deployments. Whether the sensor ships with an SDK for your operating system is a per-project filter.
Which 3D LiDAR Sensor Is Best for My Application?
There is no single best 3D LiDAR — only best-for-your-weights. Apply the RARE-I dimensions with different emphasis based on your buyer journey stage and you get different recommended configurations.
| Application | Heavy Weight On | Typical Config |
|---|---|---|
| Indoor AGV / AMR | Resolution + Interface | 30 m range, 360° H, 100K+ pts/sec, ROS2 |
| Outdoor Mobile Robot | Environment + Range | 100 m range, IP67, multi-echo, -20°C start |
| Perimeter Security | Range + Environment | 200 m range, 360° H, rain mode, zone config |
| Volumetric Mapping / BIM | Accuracy + Resolution | ±5 – ±10 mm accuracy, non-repetitive scan |
| Overhead Crane Safety | Environment + Interface | IP67, industrial Ethernet, vertical-plane FoV |
Manufacturers like the QJKH industrial 3D LiDAR sensor product line configure along these five dimensions, with entry models weighted toward indoor AGV parameters and outdoor models weighted toward range and environmental tolerance. Running the RARE-I filter before opening a vendor’s datasheet usually saves half the comparison time. For a structured starting point, the industrial lidar sensor selector applies the same logic interactively.
Common Failure Modes and Real Limitations of 3D LiDAR

3D LiDAR works remarkably well across remarkably different environments — right up until it doesn’t. Vendor datasheets rarely talk about failure modes, but every production deployment encounters at least one of the five cases below.
- Retroreflector blooming happens when high-visibility safety vests, reflective tape on pallets, and warning signage reflect laser pulses back at intensities that saturate the receiver. The sensor either reports the reflector at wrong range or drops the frame entirely. Mitigation: lower echo sensitivity in config, or mask the reflector zone in software.
- Multipath returns in metallic environments show up inside a shipping container, a port gantry, or a metal-clad warehouse — laser pulses bounce off multiple surfaces before returning. One port automation project lost three weeks to phantom detections from container walls; the root cause was multi-echo filtering set too aggressively, which elevated second-return pulses to primary detections. Dropping the echo-selection threshold and tightening the intensity filter resolved it.
- Rain, fog, and snow clutter degrade range. A peer-reviewed 2024 study by Pao et al. in PMC documented meaningful lidar performance degradation when raindrops adhere to the sensor’s outer surface. Multi-echo filtering helps but does not eliminate the problem. Expect a 20 – 40% effective range reduction in heavy rain.
- Temperature drift persists even when a sensor is rated -20°C to 60°C operating temperature — residual drift remains across that range. For surveying-grade accuracy (±5 mm), warm-up periods and active thermal compensation are standard. Industrial accuracy (±2 cm) tolerates the drift without special handling.
- Sun glare on Flash LiDAR: because Flash illuminates the whole scene at once and reads it on a detector array, direct sun at the same wavelength saturates every pixel. Mechanical spinning and non-repetitive scanners sidestep this because their detectors see only the tiny instantaneous laser spot.
💡 Pro Tip
Costliest misconceptions equate more points per second with better detection. For small objects at range, angular resolution beats raw density — a sensor with 0.1° resolution at 60K pts/sec will register a 15 cm pedestrian at 50 m that a 1.0° sensor at 300K pts/sec misses entirely. Ask about the minimum detectable object size at working range, not just the point-count headline.
Frequently Asked Questions
How much does a 3D LiDAR sensor cost?
View Answer
Industrial 3D LiDAR sensors span roughly $500 for short-range indoor units to $10,000+ for long-range outdoor systems, and $50,000+ for automotive-grade sensors. Volume pricing diverges sharply from single-unit quotes — annual volumes above 50 units usually unlock OEM tiered pricing that cuts per-unit cost by 30 – 60%. Use the LiDAR ROI estimator to model payback against collision-avoidance savings.
Can a 3D LiDAR sensor work in complete darkness?
View Answer
Yes. Because 3D LiDAR is an active sensor — it fires its own laser pulses — it does not depend on ambient light. Performance at 3 AM in a blackout-dark warehouse is identical to performance at noon under fluorescent lighting.
What is point cloud data in plain terms?
View Answer
A point cloud is a set of 3D coordinates (X, Y, Z) representing a scanned scene. Where a photograph captures color, a point cloud captures geometry — imagine a room where every surface has been sprinkled with millions of tiny dots at precise distances from the sensor. Denser clouds reveal smaller features; sparse clouds only resolve larger shapes.
How accurate is a 3D LiDAR sensor?
View Answer
Industrial-grade 3D LiDAR typically delivers ±2 cm ranging accuracy across the working distance envelope. Surveying-grade sensors reach ±5 mm through active thermal compensation and longer integration times. Accuracy figures from datasheets assume cooperative targets — dark, absorbing, or highly oblique surfaces degrade accuracy, sometimes significantly.
How do I use 3D LiDAR on iPhone?
View Answer
iPhone Pro models since 2020 include a direct time-of-flight (dToF) LiDAR scanner on the rear camera array, used by augmented reality apps, room scanning tools, and accessibility features. Apple’s consumer LiDAR works at short range (under 5 m) and is not intended for industrial applications. For industrial use, specify a dedicated industrial 3D LiDAR sensor like the ones in the industrial 3D LiDAR product line rather than adapting a consumer device.
What is the difference between 4D and 3D LiDAR?
View Answer
A 3D LiDAR measures X, Y, Z coordinates per point. A 4D LiDAR adds a fourth dimension — per-point velocity — by analyzing Doppler shift in the reflected signal using frequency-modulated continuous-wave (FMCW) techniques. 4D enables instantaneous motion detection without frame-to-frame tracking. It is emerging in automotive applications and still rare in industrial sensors, where 3D point clouds provide sufficient information for most use cases.
Does 3D LiDAR replace 2D LiDAR for safety-certified applications?
View Answer
No. SIL-rated and PL-e certified 2D safety laser scanners remain the dominant choice for functional safety applications on AGVs and in machine guarding, because they carry validated diagnostic coverage and pedigree that 3D sensors currently do not. The common architecture pairs a certified 2D safety laser scanner for AGV for E-stop functions with a 3D LiDAR for navigation and volumetric perception.
Putting It All Together
3D LiDAR is not a future technology — it has been flying on spacecraft since 1971 and has been standard equipment in industrial automation for most of the last decade. What has changed is the cost curve, the variety of scan mechanisms available, and the sophistication of downstream software. Buyers who understand the pulse-to-point-cloud pipeline, the trade-offs between mechanical and solid-state scan mechanisms, the honest limitations of the technology under rain and retroreflector conditions, and the RARE-I framework for dimension-weighted selection will choose better sensors than buyers comparing datasheet headline numbers alone.
Narrowing by application is the practical next step. The 2D vs 3D LiDAR decision tool covers the first fork. For buyers already past that decision, working through the RARE-I dimensions against concrete specifications — starting with the QJKH 3D LiDAR sensor configurations or the solid-state LiDAR sensor options — converts an overwhelming vendor landscape into a shortlist.
About This 3D LiDAR Guide
This guide draws on two decades of industrial safety sensor engineering at CCH Shanghai Sensing (QJKH), combined with peer-reviewed research on 3D LiDAR SLAM benchmarks, IEC 60825-1:2014 laser safety mechanics, and documented failure modes of lidar systems under adverse weather. Where vendor claims diverge from academic data — as with solid-state cost economics at 360° coverage — the data wins. Reviewed by the CCH Shanghai Sensing engineering team.
References & Sources
- Apollo 15 Press Kit (Laser Altimeter) — National Aeronautics and Space Administration
- IEC 60825-1:2014 Safety of Laser Products — International Electrotechnical Commission
- LOAM: Lidar Odometry and Mapping in Real-time — Ji Zhang & Sanjiv Singh, Carnegie Mellon University, RSS 2014
- Investigation of Automotive LiDAR Vision in Rain — Pao et al., PMC 2024 (peer-reviewed)
- A Benchmark for Multi-Modal LiDAR SLAM with Ground Truth — MDPI Remote Sensing 2023 (peer-reviewed)
- A Benchmark for Multi-Modal Lidar SLAM (arXiv preprint) — arXiv 2210.00812
- LiDAR Market Report 2025-2030 — MarketsandMarkets
- Ouster and Velodyne Complete Merger of Equals — Ouster Investor Relations (Feb 2023)