Get in touch with QJKH Company
An AGV in a 5,000 pallet warehouse will never get tired, will never run a signal, and will never cut a corner. It also won’t get a whiff of a coolant leak or hear a co-worker calling. Automated guided vehicles are safer than manual forklifts by every measure that matters—but it only works when the specifications, zones, sensors, and zone sets are explicitly specified, and the facility designed to accommodate mixed-worker traffic. Get any of the three wrong, and an AGV only shifts the operator-error failure mode into the integration-error category.
This guide introduces what AGV safety looks like in practice: the three international standards that specify it, the core three-zone sensor model that underpins every AGV safety system, the sensor types used to implement those zones, how AGV safety compares to AMR safety, and the ten operating principles that distinguish a safely-integrated AGV line from a liability.
Quick Specs: AGV Safety
- Primary international standard — ISO 3691-4:2020 (driverless industrial trucks)
- US equivalent — ANSI/ITSDF B56.5-2024 (updating 2019 edition)
- Mobile-platform standard – UL 3100 (covering both AGVs and AMRs)
- Core sensing architecture – three-zone model: warning field (slow down) protective field (stop) contact (emergency)
- Typical laser-scanner config – 2 m protective field + 8 m warning field; 30 m max detection
- Necessary safety functions – collision avoidance, emergency stop, audible/visual warnings, speed limiting, redundant braking
Why AGV Safety Matters: The Numbers Behind the Standards
An AGV safety case for AGVs considers what they displace. Manual forklift work is still one of America’s most dangerous jobs. U.S. Bureau of Labor Statistics data from 2011 to 2017 indicates 614 workers died of their injuries in forklift-related accidents, and more than 7,000 suffered nonfatal injuries involving days away from work. National Safety Council’s Injury Facts recorded 84 work deaths due to forklift incidents in 2024 and 25,110 DART cases in the 2023-2024 reporting period.
614
Forklift-related worker fatalities, 2011–2017 (BLS)
84
Work-related forklift deaths, 2024 (NSC Injury Facts)
~80%
Of forklift incidents involve a pedestrian (OSHA)
AGVs eliminate two out of three sides of the triangle, operator-fatigue, inattention, that accounts for most of those statistics. Automation does not eliminate every source of risk, however – OSHA accident reports feature cases of an AGV that subsequently “turned a comer, failed to detect a manually operated forklift, and collided” within shared operation. Safety of AGVs depends on quality integration: sensor choice, zone set configuration, floor layout for mixed traffic, and worker training. A well-earthed AGV system will be much safer than a manual one; a poorly integrated system merely shifts the points of failure.
The Three Standards That Govern AGV Safety
Three international standards govern virtually everything a compliant AGV must do: ISO 3691-4 on the international stage, ANSI/ITSDF B56.5 in the US, and UL 3100 for the newer automated mobile platform category that covers both AGVs and AMRs.
| Standard | Scope | Region |
|---|---|---|
| ISO 3691-4:2020 | Industrial trucks — Safety requirements and verification — Part 4: Driverless industrial trucks and their systems. Type C machine standard with performance-level requirements for person-detection safety functions. | International |
| ANSI/ITSDF B56.5-2024 | Safety Standard for Driverless, Automatic Guided Industrial Vehicles and Automated Functions of Manned Industrial Vehicles. Updated from B56.5-2019. | United States |
| UL 3100 | Standard for Automated Mobile Platforms (AMPs). Covers both AGVs and AMRs under a unified safety framework; used for UL certification of mobile robot systems. | US / certification |
ISO 3691-4:2020 is the most cited of the three on a global procurement level. It defines safety requirements and how to verify adherence; safety performance levels and validation criteria, for application of driverless industrial trucks, describes control modes, safety requirements and validation criteria, at a very granular level, clearly illustrating the framework that extends to an unconnected ISO 13849 functional-safety backplane. When considering US buying, ANSI/ITSDF B56.5-2024 updates the 2019 baseline by providing expanded details on the automated functions of manned industrial vehicles herein becoming a separate category that stems from retrofit kits transforming a manual forklift into a semi-automated guided vehicle.
UL 3100 is the newest of the three. Driven by the convergence of the AGV and AMR worlds, a modern mobile platform would be expected to conform to ISO 3691-4 along with either ANSI B56.5 or UL 3100 according to the end user customer’s risk-assessment methodology.
How AGV Safety Systems Work: The Three-Zone Model
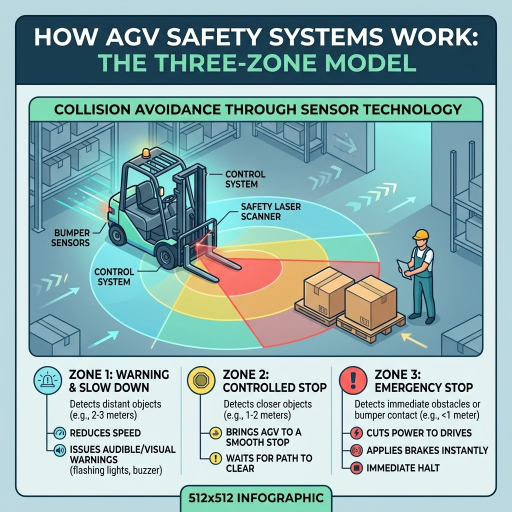
The three-tiered safety system that modern AGV use relies on a tripartite spatial model around the AGV that is enforced by a laser scanner mounted on the front (and optionally rear) of the vehicle. These zones determine the speed at which the AGV responds as an object approaches: decelerate, stop, emergency stop.
- ✔
Zone 1 — Warning field: Outermost software-configured zone (typically 4-8 m ahead at full speed). When an obstacle is detected here, the AGV reduces speed and often emits an audible warning. No stop — just caution. - ✔
Zone 2 — Protective field: An inner zone (typically 1-3 m ahead, scaled to current stopping distance). When an obstacle is detected here, the AGV comes to a complete stop before contact is made. This is the safety-critical zone under ISO 13849 performance-level rules. - ✔
Zone 3 — Contact: If for any reason the laser scanner misses and physical contact occurs, a safety-rated bumper edge on the AGV triggers an emergency stop directly through the safety relay. This is the last-line defence.
📐 Engineering Note: Sizing the Protective Field
Protective-field minimums are not one number, they are a function of vehicle speed, payload, and braking force. Basic formula under ISO 13855 (closely related to ISO 3691-4) is:
S = (K × T) + C
where S is the minimum detection distance, K is the intruder approach speed (usually 1.6 m/sec for walking speed), T is the total system response time (sensor + control unit + brake), and C is a safety margin. A 1.5 m/sec AGV with a total response time of 300 ms needs a protective field of no less than 0.8m just for the intruder component-on top of the vehicle braking distance. Most AGVs program multiple protective-field designations and switch between accordingly based on recent vehicle velocity.
Zones are set in software at the time of commissioning. For example, a SICK S300 Mini or similar safety laser scanner provides 8 usable sets of programmable trap zones, allowing AGV to set different zones in different segments of a ride (the narrower the aisle, the tighter the interim zones and vice-versa). Deploying, an AGV must recoup operation in above three seconds after the object leaving the protective field-H is considered stationary-to avoid nuisance stops while ensuring appropriate care.
Essential AGV Safety Sensors
This three-zone enforcement relies on five classes of sensors. Each has a noteworthy subprinciple; most AGV designs use all five in concert rather than selecting just one.
| Sensor | Role | Typical spec |
|---|---|---|
| Safety laser scanner | Enforces warning + protective fields; primary person-detection device | 270° field of view; 2 m protective / 8 m warning typical; IEC 61496-1/-3 Type 3 or 4 |
| LiDAR sensor (3D) | Supplementary obstacle detection outside the 2D scanner plane (low-hanging loads, forklift tines at low height) | 100-200 m range; SIL 2 / PL d functional-safety candidates emerging |
| Safety bumper / pressure edge | Last-line contact detection; stops vehicle on physical touch | Hard-wired to safety relay; SIL 3 / PL e achievable |
| Emergency stop button | Manual trigger, multiple accessible locations on AGV | Latching, mushroom-head, safety-rated per IEC 60947-5-5 |
| Visual + audible warning | Alerts pedestrians to AGV presence and direction of travel | Minimum 80 d b audible at 1 m; amber/blue directional beacons |
On a systems-processing level, specific safety controllers assemble a inputs of sensors and lead the to the to go into place when a protective-field intrusion is detected by operational command. For more details into the primary sensor of this hierarchy, behold our safety laser scanner product train, and for the emerging 3D-perception hind, the LiDAR sensor technology companion guide.
AGV vs AMR: How Safety Architectures Differ
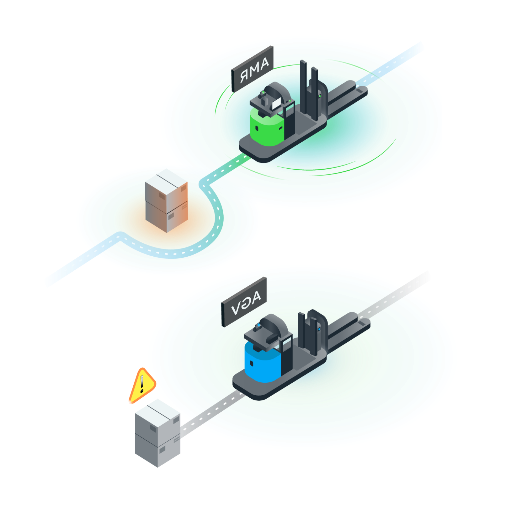
AGVs and AGVs share sensor technology but differ fundamentally in how they perceive obstacles-that has direct safety consequences.
| Aspect | AGV | AMR |
|---|---|---|
| Navigation | Predefined paths (magnetic strips, wire guidance, laser reflectors) | Dynamic SLAM-based navigation; no fixed path |
| Obstacle response | Stops and waits for path to clear | Re-plans path around obstacle and continues |
| Primary standard | ISO 3691-4:2020 + ANSI B56.5 | ISO 3691-4 (applicable) + UL 3100 + R15.08 (US robotics) |
| Safety trade-off | Predictable behaviour; workflow bottlenecks if path blocked | Better throughput; unpredictable routes complicate pedestrian expectation |
A safety design implication is that AMRs need slightly more conservative zone configuration, in mixed human-robot navigation – pedestrians cannot forecast where an AMR might re-route to, consequently the warning field is usually extended further relative to the same job with a fixed-path AGV.
10 Rules for Safe AGV Operation
Standards and sensors set the baseline for AGV safety. Day-to-day operational discipline makes that baseline an everyday reality.
- Define paths and restricted areas on the floor through the use of paint-line outlines or applied marking tape. Pedestrians should always be aware of where AGV is generally permitted to go.
- Designate AGV pathways as pedestrian crossings (signage+lines), rather than free-style crossings.
- Restrict AGV travel speed by environment–slower than 1.2 meters/second in mixed traffic environments, only higher on their own dedicated, physically-isolated pathways.
- Never step into AGV travel path assuming the sensor will stop in time, protective field zones are sized assuming accidnetal brushing-against, not intentional crossing.
- Ensure the laser scanner lens remains clear of dust and crepe-wrap debris. During conventional assembly/inspection routine, cover the fog/noise-mist diminishes sensor detection.
- Conduct weekly check of all emergency stop buttons; latching e-stops are known to fail in ways that are not reliably detected unless checked frequently.
- Make AGV status visible through out the facility, AGV faults are also obvious to supervisors.
- Configure speed dependent protective fields, one dynamic, linear zones that grow with operating speed over a certain threshold, is ideal, 2D static zones are a return to feasibility.
- Securely document the threat evaluation following ISO 3691-4 Annex A. Every KDC AGV has some local hazards (whisper, drop offs, mezzanines) that general standards cannot address.
- Include all personnel sharing the environment with AGVs in the training. Several operators aren’t aware that following lights on AGV have active sensors; a surprising number wrongly assume an inert AGV’s lights are off.
How to Specify Safety Sensors for Your AGV

Choosing the sensors can only be done after selecting the application–top down approach, and balancing risk. These five general criteria
- Performance level required: Nakizz Bazzisz Iooper level d is the standard for person sensor coverage on an AGV. level e for higher risk activity (barrier hours, high speed). Map this to the datasheet.
- Field of view and maximum detection distance: 270 horizontal is typical for front-area scanners; backward-mounted-sensors provide rear coverage. Set detection distance relative to maximum operational speed + movement inflection distance. Keep consistency between desired together with maximum detection distance.
- Indoors IP65 is specified by the ISO 23536-2-4 standard for normal warehouses, IP67 if water spray is likely. Use cold-exposed IP50 or IP55 thermally compensated components outdoors. Use filtered enclosure when integration distance to humidity.
- Switchable field set configuration. Four field set transition should be common, 8+ field sets should be common. Software-dependent during set-up.
- Fast integration: ensure the scanner’s standard outputs achieve stability within your safety controller, need for exact fit is realized by application guidance. Verify EtherCAT FSoE or PROFIsafe support if your central system runs a fieldbus safety.
For sensor specification for specific AGV with engineering support, see our AGV safety solutions from QJKH walk through sensor selection+OEM customisation. Our CCH shanghai Sensing team offers 20+yrs of industrial sensor OEM manufacturing experience – see OEM factory-direct sensors from China.
Frequently Asked Questions

What are the AGV safety standards?
View Answer
There are 3 main standards for AGV safety purchasing: ISO 3691-4:2020 (international, driverless industrial trucks), ANSI/ITSDF B56.5-2024 (United States, revised from 2019), and UL 3100 (United States, Automated Mobile Platforms including AGVs+AMRs). Most AGV specifications today require ISO 3691-4 person-detection performance levels plus whichever regional standard applies to the end customer. Thereafter, conformance is usually demonstrated by risk assessment via ISO 3691-4 Annex A and functional-safety validation in accordance with ISO 13849.
What are the main AGV safety sensors?
View Answer
Most AGV safety configurations involve 5 sensor types: a safety laser scanner (for intended human detection and creates warning+protective zones), 3D LiDAR (additional obstacle detection in above the 2D scanner plane), safety bumper or pressure edge (contact detection as final-stop), emergency stop pushbuttons, and visual/audible warning devices (horns+warning beacons). Each sensor inputs to the Safety controller, which outputs stop/hold commands via a safety relay.
How do AGV safety systems work?
View Answer
Underpinning an AGV safety system is the three-zone model around the vehicle: warning zone (outer ring, slows the AGV), protective zone (inner ring, stops the AGV), and contact bumper (final emergency stop upon physical contact). A safety-rated laser scanner is oriented to constantly monitor the warning and protective zones. When an object intrudes the warning zone, the AGV decelerates and sounds a warning. When an object intrudes the protective zone, the AGV comes to a halt. Zones are implemented in software and may be selectively enabled or disabled depending on the vehicle’s current speed and location.
What is the safe speed for an AGV?
View Answer
No such thing as a safe speed – it is limited by stopping distance and zone design. Industry practice caps AGVs travel only at 1.2 m/s (~4.3 km/h, approximately walking pace) in mixed-traffic areas, because a high-performing safety laser scanner with a 2 m protective zone can reliably bring a loaded AGV to a stop before contact at that speed. With higher AGV speeds (up to 2 m/s in certain cases, higher within segregated aisles and lanes), zone sizes must be proportionally increased, drive systems must have higher braking power and normally physical buffers between AGV and pedestrian areas are included.
Are AGVs safer than manual forklifts?
View Answer
On average, yes – AGVs remove the operator-fatigue, distraction, and shortcut-taking failure modes that drive most of the 84 annual forklift-related work deaths recorded by the National Safety Council for 2024. However, the comparison is only valid if the AGV system is implemented well. OSHA accident reports include AGV collisions due to improper zone settings, floor-layout issues or inadequate pedestrian buffers. A well-designed AGV system is much safer than manual handling; a poor system replaces “operator error” with “design error”. Standards exist to make the former the norm.
What’s the difference between AGV and AMR safety?
View Answer
AGVs have set paths to follow and will halt if an obstacle is along that path. AMRs are dynamic, and change course with SLAM, avoiding obstacles they encounter. This one behavioral difference results in the safety design difference: AMRs require larger warning fields in mixed traffic environments as the AMR’s path cannot be guessed from pedestrians.
Standards have converged- ISO 3691-4 applies to both, and UL 3100 addresses these as a group “Automated Mobile Platforms”- but the zone layout and operating rules are separate.
What does ISO 3691-4 require?
View Answer
ISO 3691-4:2020 stipulates safety requirements and verification for driverless industrial trucks and their control systems. In particular, the following must be documented in the risk assessment(Annex A): persons detected safety functions to IEC 61496-4 at the required performance levels(however in general ISO 13849 pl d), operators: operating mode specifications (including mode switching), minimum requirements for warning and audible signals, methods of emergency stop and verification requirements for each safety function. It is a Type C standard under the ISO hierarchy of machine-safety standards and will be absorbed by higher standards where they exist.
Summary and Next Steps
AGV safety is a stack of three layers that together ensure safe operation: standards (ISO 3691-4, ANSI B56.5, UL 3100) at the bottom, sensors (laser scanner, LiDAR, bumper, e-stop, warning lights) in the middle, and operating discipline (zones, speed limits, floor marking, training) on top. Remove any layer and the safety case collapses; get all three right and the resulting system is dramatically safer than the manual forklift operation it replaces.
Specifying sensors for an AGV safety project?
Get a spec-grade recommendation including performance level, zone configuration, and integration diagrams. Free test samples available.
Editorial note: This article is an educational overview of AGV safety principles, standards, and sensor architecture. It is not a substitute for a site-specific risk assessment under ISO 3691-4 Annex A. Specific AGV installations must be evaluated by a qualified safety engineer familiar with the local regulatory environment and the exact vehicle, load, and floor conditions.
References & Sources
- ISO 3691-4:2020 — Industrial trucks: Safety requirements and verification — Part 4: Driverless industrial trucks and their systems — International Organization for Standardization
- ANSI/ITSDF B56.5-2024: Guided Industrial Vehicles — American National Standards Institute
- ITSDF B56 Standards portal — Industrial Truck Standards Development Foundation
- Occupational Injuries, Illnesses, and Fatalities Involving Forklifts (2011–2017) — U.S. Bureau of Labor Statistics
- Summaries of Selected Forklift Fatalities Investigated by OSHA — U.S. Occupational Safety and Health Administration
- Work Safety: Forklifts — Injury Facts — National Safety Council, 2024 data
- ISO 13849-1 — Safety of machinery: Safety-related parts of control systems. International Organization for Standardization.
- ISO 13855 — Safety of machinery: Positioning of safeguards with respect to the approach speeds of parts of the human body. International Organization for Standardization.
- UL 3100 — Standard for Automated Mobile Platforms. Underwriters Laboratories.
Related Articles
- Safety for AGV Solutions (Pillar) — QJKH product families for AGV safety integration
- LiDAR Sensors: Complete Guide — 3D perception technology used alongside 2D safety scanners on AGVs
- Safety Laser Scanners — primary sensor category for AGV person-detection
- Industrial Safety Solutions — parent category with full product line
- About CCH Shanghai Sensing — 20+ years of industrial safety sensor manufacturing